2019年,华东师范大学通信与电子工程学院吴幸教授与清华大学乔飞副教授合作,带领原位智能传感技术研究团队,报道了一种“一举两得”的双模石墨烯(Gr)-氧化石墨烯(GO)异质结构膜。该成果在线发表在本领域顶级期刊IEEE Transactions on Electron Devices(DOI:10.1109/TED.2019.2949583),该研究工作得到了国家自然科学基金、上海市科委重点项目、中国科协青年人才托举工程等的资助。
人工智能技术发展日新月异,在未来,机器人是否可以实现触摸呢?机器人的手指,也就是传感器,可以将触觉信号转换成电信号,电信号传递到“中枢神经”而被识别。机器人的四肢,也就是执行器,可根据电信号指令来机械变形,从而完成仿生移动或抓举动作。然而,由于工作机理不同,制备相同结构的双模式传感和执行的双模器件仍然具有挑战性。
针对以上挑战,吴幸教授团队一直致力于先进器件的研究工作:探索压力、温度、湿度和光电等传感器在穿戴式、可靠性检测和物联网领域的系统应用。前期工作发表在相关领域高水平期刊,如Nature Communications (两篇)、Small (一篇)、Sensor (一篇)等。此次双模传感器的成果是前期工作的拓展与延续。该双模传感薄膜灵敏度高、高频响应好,可以套在手指上,用于识别“石头”、“剪刀”和“布”的手势,分类精度达99.4%。同样的,电信号可以使双模执行器弯曲变形,以模仿人手抓举物体的动作,这为智能传感技术的集成提供了新思路。
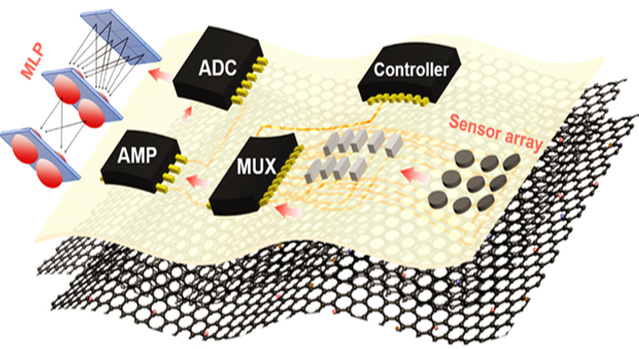
图a).柔性双模器件原理图

b). “布”,“剪刀”和“石头”的手势识别
c).人手抓举模仿
文 | 吴幸
图 | 吴幸、田希悦
